生物识别模块
宏道科技提供各种各样的传感器给客户选择,我们与竞争对手相比拥有很强的优势。如果您正在寻求最好的指纹识别解决方案,请参阅下面的传感器信息,与宏道科技的销售团队的联系。
各类指纹传感器技术
- 光学传感器
有最悠久的历史,可以追溯到20世纪70年代。依据的是光的全反射原理(FTIR)。光线照到压有指纹的玻璃表面,反射光线由CCD去获得,反射光的数量依赖于压在玻璃表面指纹的脊和谷的深度和皮肤与玻璃间的油脂。光线经玻璃设到谷后反射到CCD,而设到脊后则不反射到CCD(确切的是脊上的液体反光的)。
由于最近光学设备的革新,极大地降低了设备的体积。最近90年代中期,传感器可以装在6x3x6英寸的盒子里,在不久的将来更小的设备是3x1x1英寸。这些进展取决于多种光学技术的发展而不是FTIR的发展。例如:纤维光被用来捕捉指纹图象。纤维光束垂直射到指纹的表面,他照亮指纹并探测反射光。另一个方案是把含一流微型三棱镜矩阵的表面安装在弹性的平面上,当手指压在此表面上时,由于脊和谷的压力不同而改变了微型三棱镜的表面,这些变化通过三棱镜光的反射而反映出来。
- 温度传感器
温度传感器包含一系列的温度测量像素之间作出区分的皮肤温度(山脊)和空气温度(山谷) 。一个方面,这个传感器可以相当小,因为温度扫描可以得到全面的手指在传感器上。
- 电容式传感器
是最近在市场上才出现的,尽管它在传奇文学作品中已经出现近20年。这些含有微型晶体的平面通过多种技术来绘制指纹图象。电容传感器通过电子度量被设计来捕捉指纹。电容设备能结合大约100,000导体金属阵列的传感器,其外面是绝缘的表面,当用户的手指放在上面时,皮肤组成了电容阵列的另一面。电容器的电容值由于金属间的距离而变化,这里指的是脊(近的)和谷(远的)之间的距离。压感式表面的顶层是具有弹性的压感介质材料,他们依照指纹的外表地形(凹凸)转化为相应的电子信号。温度感应传感器被设计为感应压在设备上的脊和远离设备的谷温度的不同。
- 超声波射频传感器
被认为是指纹取像技术中非常好的一类。很象光学扫描的激光,超声波扫描的是皮下真皮的指纹。紧接着,接收设备获取了其反射信号,测量他的范围,得到脊的深度。不象光学扫描,积累在皮肤上的脏物和油脂对超音速获得的图象影响不大,所以这样的图象是实际脊地形(凹凸)的真实反映。
传感器主要提点:
-光学传感器:具有坚实的传感器表面和相对便宜。
-温度传感器:具有小巧的外形尺寸,可以低价大体积。
-电容式传感器:具有相对硬涂层表面的固态传感器。
-超声波射频传感器:具有良好的性能,积累在皮肤上的脏物和油脂对超音速获得的图象影响不大。
传感器
 |
 |
 |
 |
| 光学传感器 | 温度传感器 | 电容式传感器 | 超声波射频传感器 |
指纹识别卡
-产品介绍:
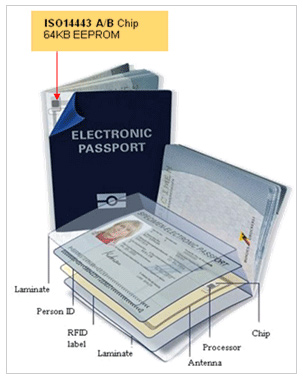
电子护照系统,需要采取综合的芯片( IC )的储存生物识别数据。 在外表,电子护照看来和传统照片的身份证护照相同。他们所不同的是,电子护照背页有一个内置的集成芯片。生物识别技术和其他数据,记录在数据页,如护照的号码和您的个人信息,将被记录在IC型片上。
-技术特点:
更强的安全性,防止伪造或篡改正式颁发的护照。由于集成电路可以记录和保存信息只有一次,一旦存储到芯片不可能修改或更改信息。电子护照还设法通过一个编码键和序号写到每个芯片上,因此它几乎是不可能的编造或篡改的电子护照。
-使用便利的签证:
海外旅游时便利的签证和入境,许多国家已通过电子护照系统也采用无人操作的自动门系统,该系统可以自动处理游客的签证和入境。当无人自动门系统使用时,通过电子护照持有人的ID验证指纹,护照持有人的信息存储在集成电路,从而使更快,更方便的签证和入境。
人脸检测模块
-产品介绍:
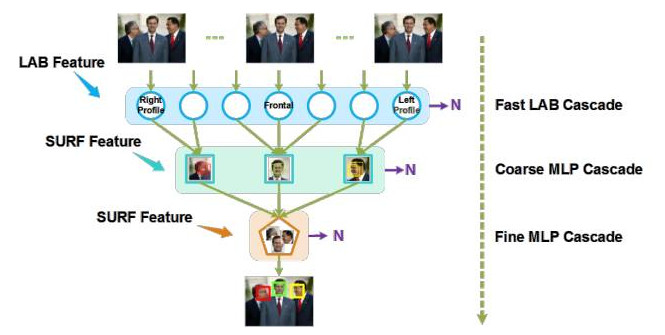
该模块基于我们提出的一种结合经典级联结构和多层神经网络的人脸检测方法实现,其所采用的漏斗型级联结构(Funnel-Structured Cascade,FuSt)专门针对多姿态人脸检测而设计,其中引入了由粗到精的设计理念,兼顾了速度和精度的平衡。 如图1所示,FuSt级联结构在顶部由多个针对不同姿态的快速LAB级联分类器构成,紧接着是若干个基于SURF特征的多层感知机(MLP)级联结构,最后由一个统一的MLP级联结构(同样基于SURF特征)来处理所有姿态的候选窗口,整体上呈现出上宽下窄的漏斗形状。从上往下,各个层次上的分类器及其所采用的特征逐步变得复杂,从而可以保留人脸窗口并排除越来越难与人脸区分的非人脸候选窗口。
-特征点定位模块:
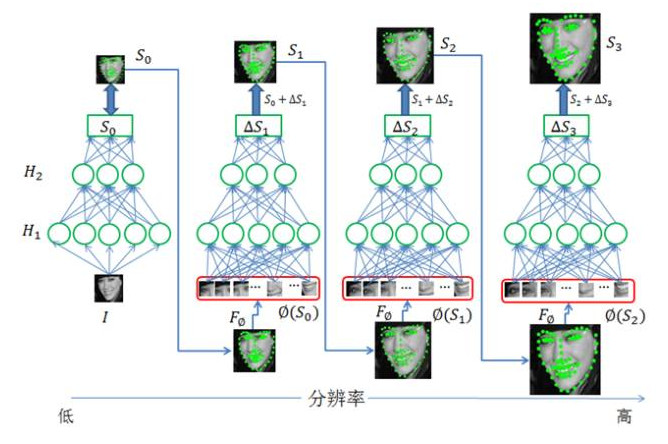
面部特征点定位(人脸对齐)在人脸识别、表情识别、人脸动画合成等诸多人脸分析任务中扮演着非常重要的角色。由于姿态、表情、光照和遮挡等因素的影响,真实场景下的人脸对齐任务是一个非常困难的问题。形式上,该问题可以看作是从人脸表观到人脸形状的复杂非线性映射。为此,SeetaFace Alignment采用的是我们提出的一种由粗到精的自编码器网络(Coarse-to-Fine Auto-encoder Networks, CFAN)来求解这个复杂的非线性映射过程。 如图 4所示,CFAN级联了多级栈式自编码器网络,其中的每一级都刻画从人脸表观到人脸形状的部分非线性映射。具体来说,输入一个人脸区域(由人脸检测模块得到),第一级自编码器网络直接从该人脸的低分辨率版本中快速估计大致的人脸形状S0。然后,提高输入人脸图像的分辨率,并抽取当前人脸形状S0(相应提升分辨率)各特征点位置的局部特征,输入到下一级自编码器网络来进一步优化人脸对齐结果。以此类推,通过级联多个栈式自编码器网络,在越来越高分辨率的人脸图像上逐步优化人脸对齐结果。
-定位结果示例:

-在AFLW数据集上的定位误差及对比情况:
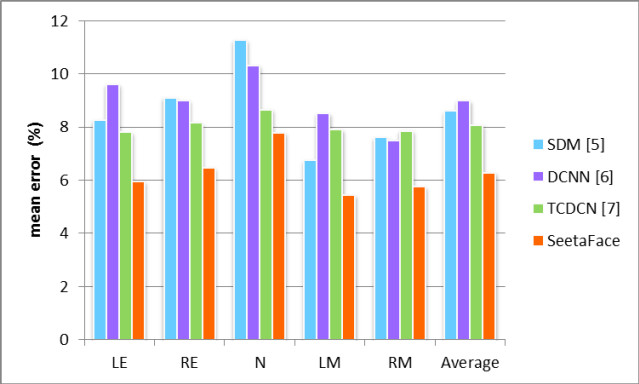
其中LE:左眼,RE:右眼,N:鼻尖,LM:左嘴角,RM:右嘴角
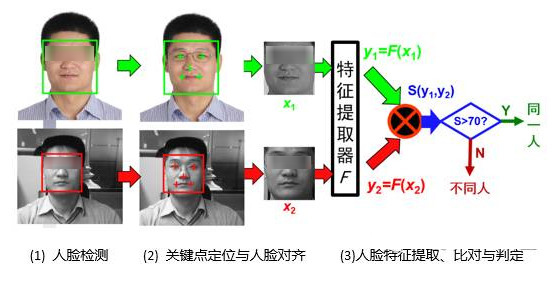
-人脸特征提取与比对模块:
人脸识别本质上是要计算两幅图像中人脸的相似程度,其一为注册阶段(类比人的相识过程)输入系统的,另一幅为识别阶段(即再见时的辨认过程)的输入。为此,如图7所示,一套全自动的人脸识别系统在完成前述的人脸检测与人脸对齐两个步骤之后,即进入第三个核心步骤:人脸特征提取和比对。这个阶段也是深度学习风起云涌之后进步最大的模块,目前大多数优秀的人脸识别算法均采用卷积神经网络(CNN)来学习特征提取器(即图7中的函数F)